|
行駛︰ |
||
|
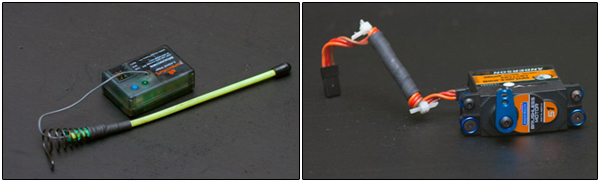
第一步工作當然是先讓車子可以開啦,所以必須先確認遙控器、接收機、電子變速器和馬達或是引擎、轉向伺服機是否連接正常,確認完遙控系統後,接下來就是動力系統。 |
||
|
|
||
|
「接收機」 「伺服機」 |
||
|
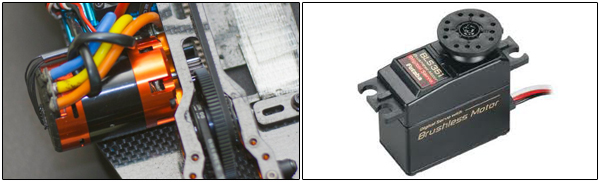
我們就先講講一般新手入門的選擇,電車吧。一開始先安裝馬達,馬達上要安裝上馬達齒,齒輪間距要調整成墊一張紙的距離,安裝完後必須要整台車用手推是順暢的,這樣才合格。安裝完馬達後,就將電子變速器和馬達焊接上去。無刷有感馬達的三條線要注意是A對A線,B對B線,C對C線,如果沒有對好是無法啟動的,接下來安裝上轉向伺服機,這樣動力系統就完成,可以下地去測試,但如果要更精密的調整就請看看以下文章吧。 |
||
|
|
||
|
「馬達和電子變速器安裝完成圖」 「 轉向伺服機」 |
||
|
|
||
| 調整︰ | ||
|
在玩車的時候常常會覺得轉彎的時候轉不過去,又可能是輕輕轉一下就甩尾了,這就是前輪與後輪貼路性的問題了。關於前輪與後輪貼路性能的平衡問題,如果前輪的貼路性遠優於後輪,或者反之,那麼前者將出現所謂「超轉向」的現象,在後者的情況下將出現「低轉向」的現象,下面對「超轉向」及「超轉向」作一簡單說明: |
||
|
低轉向: 當前輪的貼路能力較弱時,車子的質盡興獲得提高,擔當轉彎時,由於前輪滑動,因此轉過彎的軌道將比正常的軌道大得多,我們把這種現象叫做「低轉向」。 |
||
|
超轉向: 與低轉向的現象相反,當前輪的貼路能力過大時,後輪的貼路能力相對不足,此時後輪將先行轉動,於是車子子轉向姿勢將位於正常軌道的內側。我們把這種現象叫做「超轉向」。 |
||
|
|
||
|
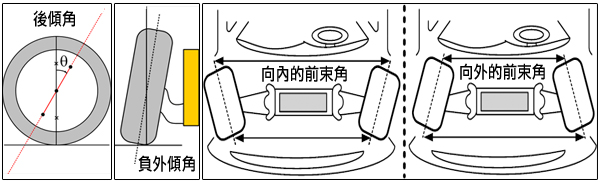
這個前後平衡問題不僅僅是車輪的貼路性問題,它還隨車子的重量平衡,以及懸掛系統和速度等因素改變。從重量平衡角度來看,最佳的狀態是後部重量佔全部重量的70~60%;前部重量佔全部重量的30~40%。前部懸掛系統得構造影響到前輪貼路性的變化。在前部懸掛系統中有輪子調整系統,與實物車相同,前輪調整分成:後傾角、外傾角、前束角這樣三種情況。不過對無線電遙控模型車來說,通常利用調整後傾角來達到調整前輪抓地力的效果。 |
||
|
|
||
|
「後傾角示意圖」 「外傾角示意圖 」 「前束角示意圖」 |
||
|
圖片資料來源 :自行拍攝及繪製 & 商品型錄 http://rc-evo.com |
||
|
|
||
|
前傾角: 轉向的軸心通常都設計了特定的角度,讓車輪接觸地面的接觸點能稍稍的超前於他們的交叉點。這項設計是要提供一個前傾角度,讓轉向這個動作可以自然而然回正。而車輪後傾角相對是落在轉向軸後。這讓車輛更容易駕駛而且增加了穩定性,並減少了打滑。過大的後傾角將會導致讓車子轉向時變得太重而且車輛反應比較慢。 |
||
|
外傾角: 外傾角可調整過彎時單輪抓地力,正的外傾角會磨損外側的輪胎,造成吃胎不平均。遙控車因為速度快,過彎激烈,通常外傾角一定要做負的,負的外傾角在過彎時可以增加抓地力,但過大的外傾角反而有反效果,大約到3度為限。 |
||
|
前束角: 最後一個就是前束角,前束角可調整直線的穩定性,「向外的前束角」直線較穩定,但轉向較慢。適合場地大彎大的高速跑道。「向內的前束角」直線不穩定,但轉向較快,適合彎多的小場地。 |
||
|
|
||
|
此外,由於輪胎是將地面和車身連接在一起的唯一仲介,所以輪胎貼路性能的好壞也是一個重要的問題。假如要做全速直線行駛的調整,必須在手不去移動不轉向的情況下,如能以穩定的姿勢全速前進,就表明性能合格。若無法達成者,一般必須檢查前輪是否能夠順暢地做左右轉動,後輪的夾緊狀態如何?夾緊螺絲有否鬆動?也極檢查前軸與後軸的平行度。此外,輪胎貼路量不足也是影響的主因,通常與製造輪子的材質有關係,也可能是重量分配及側板角度、面積及安裝位置有關係。從以上這幾方面做檢查,必能找出主要原因,使車子做到完全按直線行駛。接下來檢查車子的轉彎性能,一般來說在轉彎時都具有低轉位的傾向。當這種傾向太過強時,加大馬力的期間將不能改變方向,可以考慮調整側板的角度及面積,也可採用較軟材質的前輪,以便增加前輪的貼路量。這樣做了以後就能使車子的轉彎行駛保持低轉位的平穩特性。 |
||